
Nothing like a quick Friday update on the RoboResto project to go with your lunch.

I finished the mechanical restoration of the robot and all joints are working and moving again. A bit of work needed doing but I didn't have to replace any parts that where not sitting in our stock already. So what needed changing you ask? A robot that has been sitting idle for 20 years must have some problems, and oddly corrosion wasn't one of them.
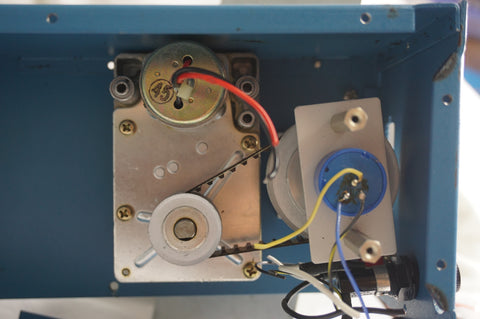
- Belts degrade overtime, the rubber separates from the lining. The belt driving the base axis of the robot was completely degraded.
- The belt was a pitch that we didn't have on hand so I switched to a different belt style and new timing pulleys.
- There was a some backlash between the potentiometer and the joint axis so new couplers where put in using some Locktight
- Some screws where set to high and rubbing on the frame of the robot so those where replaced with low profile screws.
With the mechanics cleaned up we need to redo the wiring because it really is a total mess. Stay tune for next week when we talk about what controller to use for this old robot.