
Projects — robotic arm
RoboResto: PID Arm Motion Control
Posted by Reiner Schmidt on
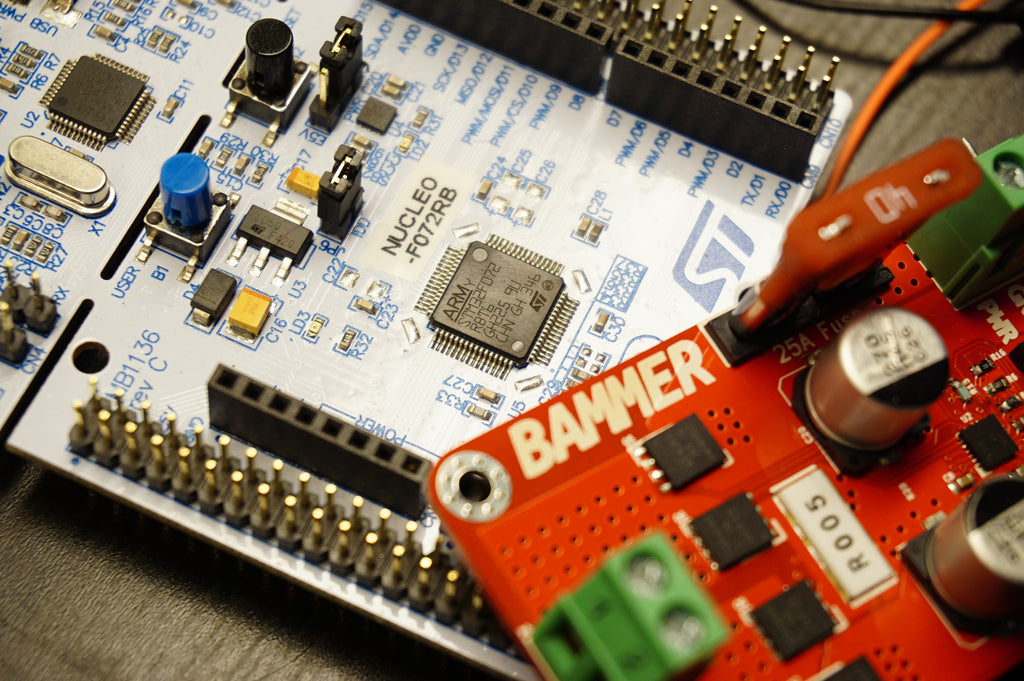
Before we start trying to build controllers for this arm we need to make sure that the logic of the design is sound. We are going to do some simple "bread-boarding" to get this arm moving. We wont be using any actual breadboard just a motor driver and an STM32 Nucleo controller (stm32f0). The Bammer motor driver was released last week and we decided to use this driver to move the robot. The Bammer drive is designed for high power motors but it can also be used for smaller motors with high efficiency. We followed some basic steps to...