
Projects
3D Printed 6 Axis Robot Arm - First Test
Posted by Reiner Schmidt on
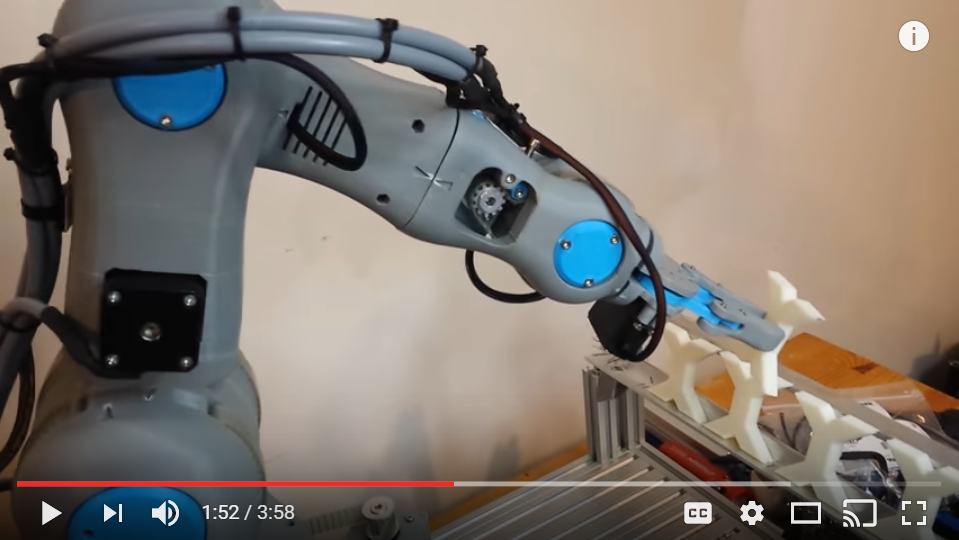
This robot was built using only a 3d printer, no machining of any components was required. The robot uses only a Raspberry Pi and SlushEngines to control the robot, and external computer is not required. I have been working with Roboteurs in hopes to offer this robot as a super advanced build it yourself kit. If you are interested in this kit and maybe getting one of our first kits email info(at)roboteurs(dot)com Robot controller: http://roboteurs.com/products/slushengine Raspberry Pi: https://www.raspberrypi.org/ This design is a remix/redesign of the two following projects. - https://github.com/BCN3D/BCN3D-Moveo - https://github.com/AngelLM/Thor
Making a Binder Clip Robot with Printabots Maker Kit
Posted by Justin Policarpio on
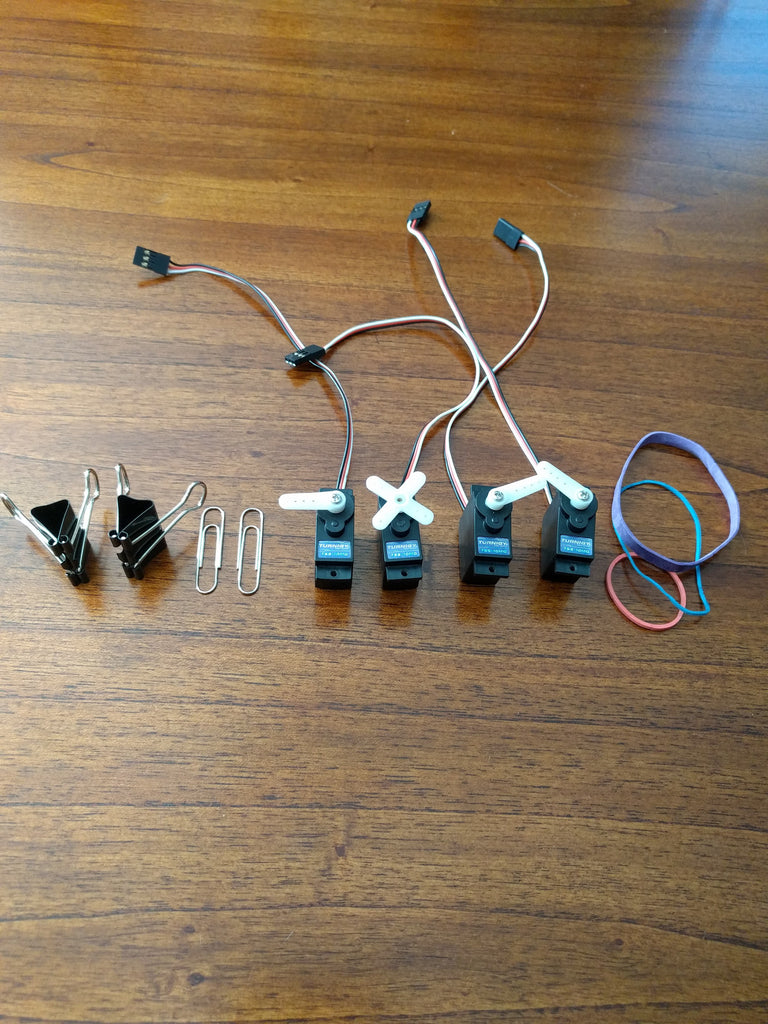
With our Printabots Maker Robot Kit, we've had customers and makers comment that it's not always easy to get access to a 3D Printer, and Shapeways isn't exactly an inexpensive option. So we decided to use our kit to make a robot using everyday items. For this robot, we use: 4 servo motors (Printabots Maker Kit) 3 servo arms (Printabots Maker Kit) 1 servo arm (X Arm) (Printabots Maker Kit) 3-4 rubber bands 2 paper clips (gripper) 2 binder clips (arm connector) servo controller (Wifinch) (Printabots Maker Kit) Optional: Android Device USB cord Instructions: We created a featured Instructable...
RoboResto: PID Arm Motion Control
Posted by Reiner Schmidt on
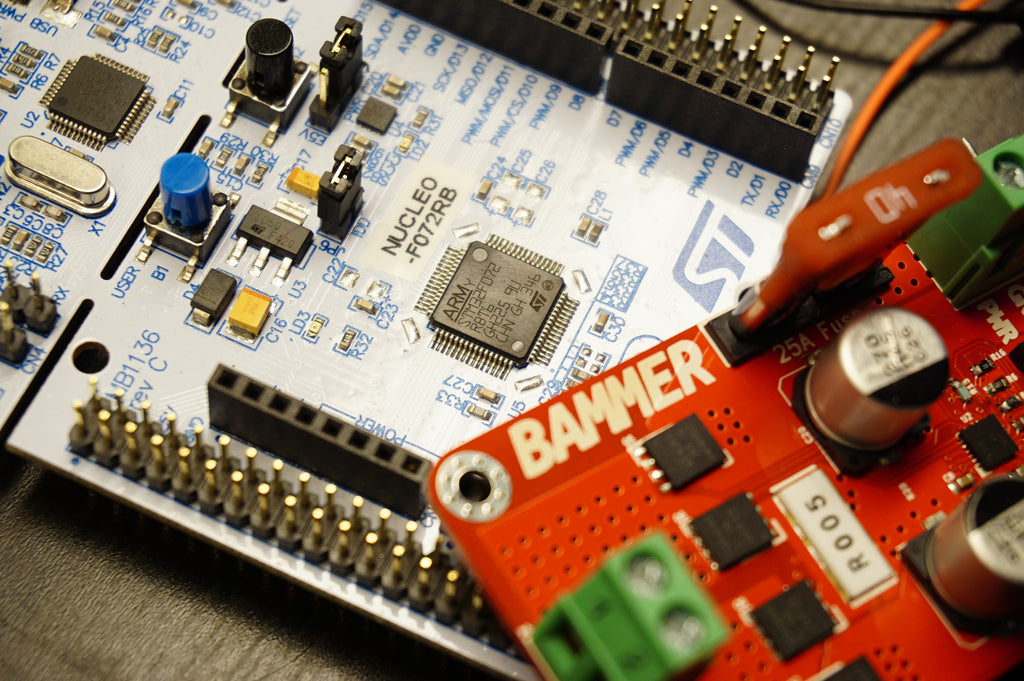
Before we start trying to build controllers for this arm we need to make sure that the logic of the design is sound. We are going to do some simple "bread-boarding" to get this arm moving. We wont be using any actual breadboard just a motor driver and an STM32 Nucleo controller (stm32f0). The Bammer motor driver was released last week and we decided to use this driver to move the robot. The Bammer drive is designed for high power motors but it can also be used for smaller motors with high efficiency. We followed some basic steps to...
RoboResto: Controller Selection
Posted by Reiner Schmidt on
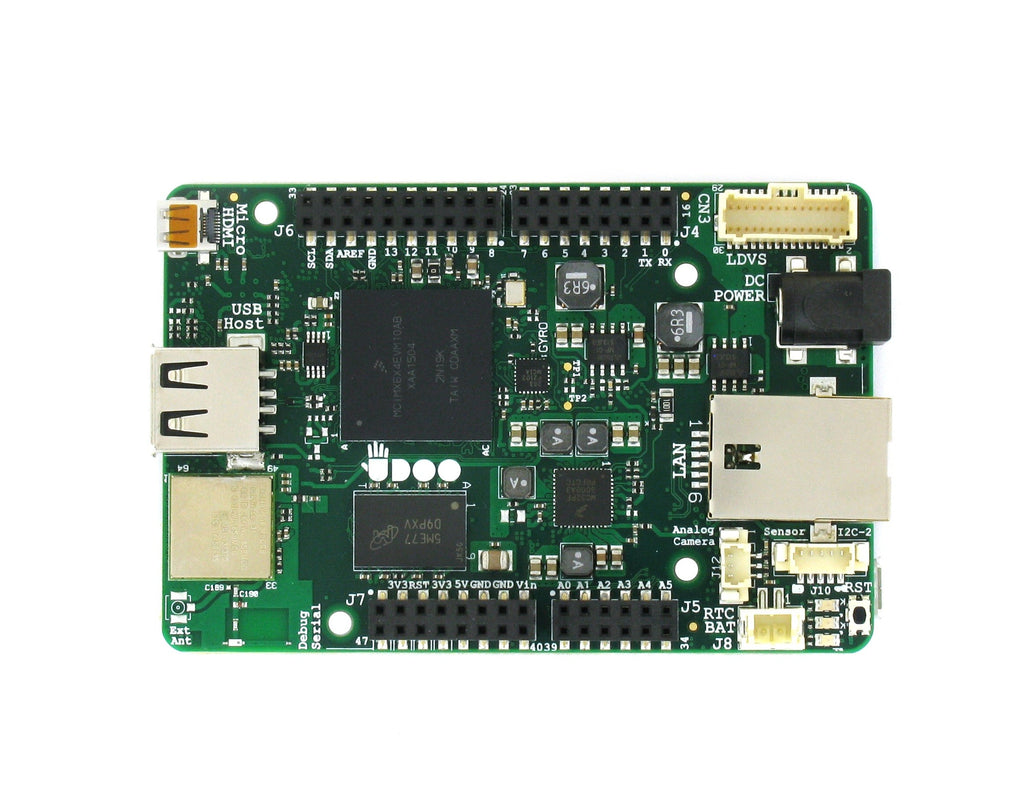
When it comes to building a robot you generally want it to have some kind of connectivity. In most cases, that's something involving TCP/IP. The majority of robots running in industry are probably getting there information from a Cat-5 cable running some kind of IP based protocol, Modbus for example. When we are restoring our old blue robot we want to make sure that it is up to industrial standards... why? Well no reason really, just for fun. With this need for control in mind we need to select a controller with networking capabilities. This project gets only a couple...
RoboResto: Mechanical Restoration Finished
Posted by Reiner Schmidt on
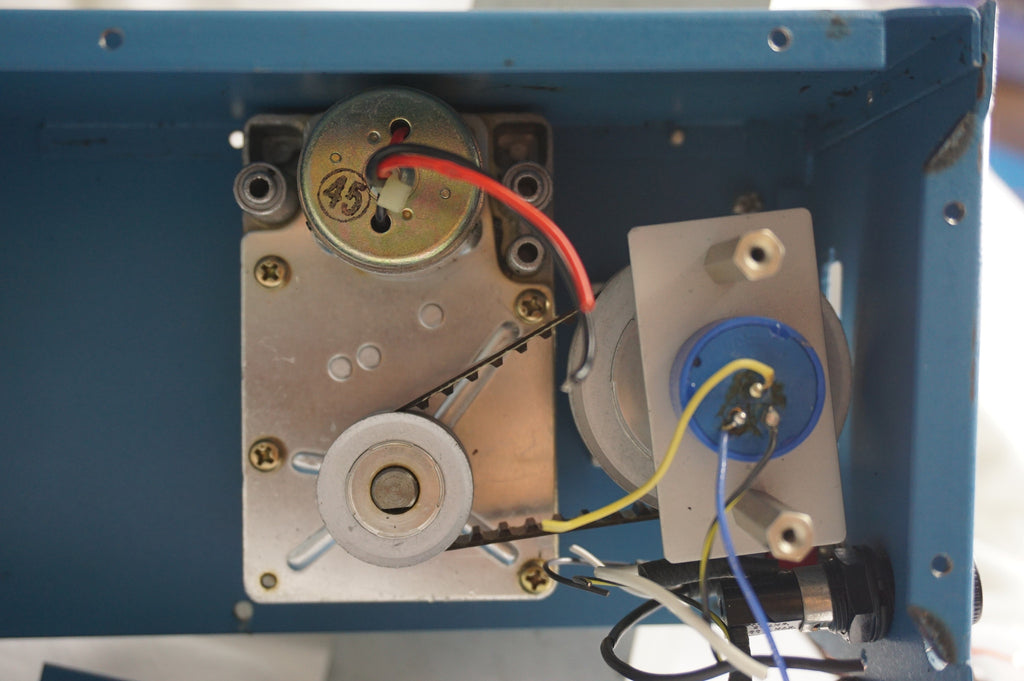
Nothing like a quick Friday update on the RoboResto project to go with your lunch. I finished the mechanical restoration of the robot and all joints are working and moving again. A bit of work needed doing but I didn't have to replace any parts that where not sitting in our stock already. So what needed changing you ask? A robot that has been sitting idle for 20 years must have some problems, and oddly corrosion wasn't one of them. Belts degrade overtime, the rubber separates from the lining. The belt driving the base axis of the robot was completely...